


Define interactions between the AS and the environment
Correctly understanding the interactions that the AS has with elements of the operating environment is a crucial part of identifying the hazardous scenarios. This activity focuses on defining those interactions.
A complex operating environment can have a large impact on any hazardous behaviour of an AS, since it increases the probability of the system encountering unusual and unanticipated scenarios. Although complex environments are not unique to AS, traditional systems often rely on the involvement of a human as an operator of the system to deal with any resulting unanticipated or unusual scenarios. For autonomous operation, a human operator is not available to deal with these scenarios, so the AS itself must be able to deal safely with such situations so that they do not become hazardous (through inappropriate decision making). This requires therefore that analysis of hazardous scenarios for an AS incorporates consideration of the operating environment in a more systematic and explicit manner than is currently the case for human‐controlled systems.
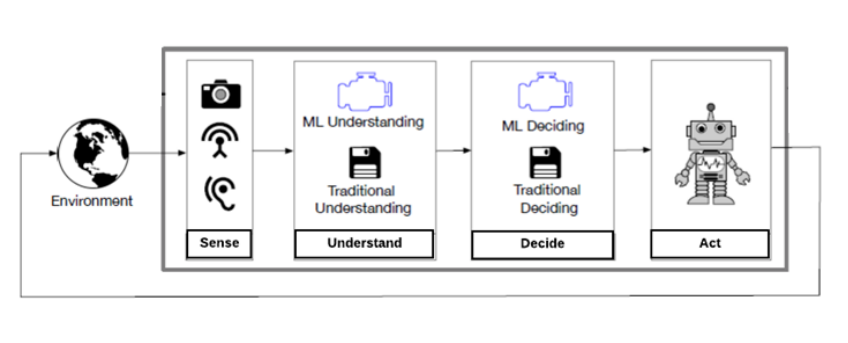
Figure 12: SUDA agent model of an AS
The ODM ([B]) is a key input used to identify the interactions that the AS may encounter during operation.
Note 8 - Mission and non-mission interactions
The consideration of interactions is not limited solely to the interactions between an AS and other agents explicitly required for the purpose of carrying out a task (sometimes referred to as ‘mission interactions’). Consideration must also be given to unexpected interactions with features such as the type of terrain encountered, as well as with unexpected agents that are not ordinarily involved in the task (‘non‐mission interactions’) [18].
Example 8 - ODM and identified interactions
- The ODM for an autonomous robot operating in an office environment may identify possible interactions with office workers, visitors, other robots etc.
- The ODM for an autonomous car may identify possible interactions with different types of road surfaces and weather conditions etc.
- The ODM for an autonomous insulin infusion pump may identify possible interactions with different healthcare professionals (e.g. doctors, nurses), as well as the patient, other medical devices etc.
Having identified the elements of the ODM with which the AS may potentially interact, the defined operating scenarios ([E]) can then be used to identify the particular interactions that may occur with those elements. This requires each scenario to be broken down into a set of steps that are undertaken by the AS as described below:
- Define start and end points of the scenario: identify the logical start/end points (the former may often be the event that triggers the scenario, and the latter asserted as the point at which the scenario is successfully completed).
- Define the steps: establish the steps involved in undertaking the scenario. Some of these steps may represent an ‘understanding point’ in the scenario where the AS requires information about a particular feature of the operating environment. These understanding points should be captured as questions with a binary (yes/no) output, such as “is an obstacle present in the planned path of the robot”. Other steps may represent a ‘decision point’ where the AS must make a choice, such as to reduce speed.
- Identify the interactions: Determine which of the defined steps may involve interaction with elements of the operating environment defined in the ODM.

